Mars Exploration Rover ( MER ) NASA's program to study the planet Mars using two of the same type of mobile, moving on the surface of spacecraft - rovers . Program Supervisor - Steve Squers .
During the implementation of the program, Mars rovers of the second generation MER-A Spirit (Spirit) and MER-B Opportunity were successfully delivered to Mars. The descent vehicle with the Spirit rover made a soft landing on Mars on January 4, 2004, in the Gusev crater (the coordinates of the landing site were 14.5718 ° S lat. 175.4785 ° E). The descent vehicle with the Opportunity rover made a soft landing on Mars on January 25, 2004 on the Meridian Plateau (the coordinates of the landing site were 1.95 ° S lat. 354.47 ° E).
With a basic 90-day life of the rovers, Spirit worked for more than 6 years until 2011 , and Opportunity set a record for the duration of the spacecraft’s functioning on the surface of Mars in 2012 and continued to work until June 2018, until it stopped transmitting data due to a global dust storm on Mars . The mission of the Opportunity rover ended on February 13, 2019.
Content
- 1 Names of Mars rovers
- 2 Mission Objectives
- 3 apparatus design
- 3.1 Batteries and heaters
- 4 Design Features
- 4.1 Power Generation
- 4.2 Communication
- 4.3 Away from dangers
- 4.4 Improved Vision
- 4.5 Improved data compression
- 4.6 Creation of maps of the district when moving
- 4.7 Soft fit technology
- 4.8 Improved mobility of the rover
- 4.9 Traveling along the paths of least resistance
- 5 Gallery
- 5.1 Panorama
- 6 Filmography
- 7 See also
- 8 Notes
- 9 References
Mars rover names


The names of the rovers were given in the framework of the traditional NASA competition by 9-year-old Russian-born girl Sophie Colliz, born in Siberia and adopted by an American family from Arizona . The names Spirit (“Spirit”) and Opportunity (“Opportunity”) were approved. [1] .
Mission Objectives
The main objective of the mission was to study sedimentary rocks , which were supposed to be formed in craters ( Guseva , Erebus ), where once there could be a lake, sea or the whole ocean.
The following scientific tasks were set for the Mars Exploration Rover mission [2] :
- Search and description of different rocks and soils that would testify to the past water activity of the planet. In particular, the search for samples containing minerals that are deposited under the influence of precipitation , evaporation , deposition or hydrothermal activity ;
- Determination of the distribution and composition of minerals , rocks and soils that surround the landing site;
- Search for iron-containing minerals, their detection, as well as assessment of quantitative relative values for certain types of minerals that contain water or were formed in water, such as iron-containing carbonates ;
- Classification of minerals and geological landscape , as well as determination of the processes that formed them;
- Verification of surface observations made using Martian reconnaissance satellite tools. This will help determine the accuracy and effectiveness of the various tools that are used to study Martian geology from orbit;
- Determine what geological processes formed the terrain, determine the chemical composition of the soil. These processes may include water or wind erosion, sedimentation, hydrothermal mechanisms, volcanism and the formation of craters;
- Search for geological causes that formed the environmental conditions that existed on the planet along with the presence of liquid water. Assessment of conditions that could be beneficial for the origin of life on Mars .
Device Design
The MER project's automatic interplanetary station includes a lander and a flight module. For different stages of braking in the atmosphere of Mars and soft landing, the descent vehicle contains a conical heat shield, a parachute system, solid propellant rocket engines and spherical airbags.
| Main components | Component | Weight | Addition |
|---|---|---|---|
| Migratory module | 243 kg | including 50 kg of fuel | |
| Lander | Heat shield | 78 kg | |
| Rear screen and parachute | 209 kg | ||
| Landing platform | 348 kg | ||
| Total | 878 kg | ||
| Rover | 185 kg | ||
| Total weight | 1063 kg |
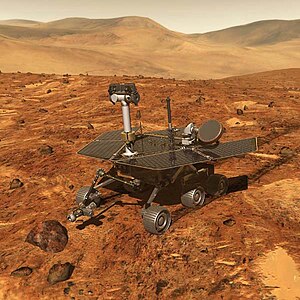
The rover has 6 wheels. The source of electricity is solar panels with a capacity of up to 140 watts [3] . With a mass of 185 kg, the rover is equipped with a grinding machine, several cameras, a micro camera ( MI ) and two spectrometers mounted on the manipulator . [4] [5]
The rotary mechanism of the rover is based on servos . Such drives are located on each of the front and rear wheels, the middle pair does not have such parts. The rotation of the front and rear wheels of the rover is carried out using electric motors that operate independently of the motors that provide movement of the device.
When the rover needs to be turned, the engines turn on and turn the wheels to the desired angle. All the rest of the time, the engines, on the contrary, obstruct the turn so that the device does not stray due to the chaotic movement of the wheels. Switching of the turn- brake modes is carried out using a relay .
Also, the rover is able to dig soil (trench), rotating one of the front wheels, while remaining at the same time stationary.
The on-board computer is built on a RAD6000 processor with a frequency of 20 MHz, 128 MB of DRAM RAM, 3 MB of EEPROM and 256 MB of flash memory [6] . The operating temperature of the robot is from minus 40 to plus 40 ° C. For operation at low temperatures, a radioisotope heater is used, which can also be supplemented with electric heaters, when necessary. [7] Airgel and gold foil are used for thermal insulation.
Rover Tools:
- Panoramic cameras ( Pancam ) - helps to study the structure, color, mineralogy of the local landscape;
- Navigation cameras ( Navcam ) - monochrome , with a wide viewing angle, also lower resolution cameras for navigation and driving;
- Miniature thermal emission spectrometer ( Mini-TES ) - studies rocks and soils, for a more detailed analysis, also determines the processes that formed them;
- Hazcam - two black and white cameras with 120 degree field of view, providing additional data on the status of the rover.
The rover arm contains the following tools:
- Miniaturized Mossbauer spectrometer ( MIMOS II ) - conducts research on the mineralogy of iron-bearing rocks and soils;
- X-ray spectrometer alpha particles ( APXS ) - analysis of the chemical composition of rocks and soils, alpha emitter made at the Russian Research Institute of Atomic Reactors (NIIAR); [8] [9]
- Magnets - collection of magnetic dust particles;
- Microcamera ( MI ) - receives enlarged images of the Martian surface in high resolution, a kind of microscope ;
- Stone Abrasion Tool ( RAT ) is a powerful grinding machine capable of creating a recess with a diameter of 45 mm and a depth of 5 mm on a rocky surface. The tool is located on the rover arm and weighs 687 grams.
The resolution of the cameras is 1024x1024 pixels . The received data is saved with ICER compression for subsequent transmission.
Batteries and Heaters
Heaters , batteries and other components are not able to survive on cold Martian nights, so they are in the "heat block with electronics." Nighttime temperatures can drop to −105 ° C. The temperature of the batteries should be above −20 ° C when they feed the rover systems, and above 0 ° C when recharging them. The heating of the “thermal block with electronics” occurs due to electric and eight radioisotope heaters, as well as due to the heat generated from the electronics [10] .
Each radioisotope heater produces about one watt of heat and contains about 2.7 g of plutonium dioxide in granules that resemble an eraser at the tip of a simple pencil in shape and size. Each granule is enclosed in a metal shell of platinum-rhodium alloy and is surrounded by several layers of carbon-graphite composite materials, which makes the entire block in size and shape resembling a C-format battery. This design of several protective layers was tested, and plutonium dioxide is located inside the heating elements, which significantly reduces the risk of planet contamination in the event of an accident landing the rover. Other spacecraft, including Mars Passfinder and the rover Sojorner , used only radioisotope heaters to keep the electronics at the optimum temperature [10] .
Design Features
All rover systems depend on a powerful computer that is protected from the effects of low temperatures. In the center of the rover there is an important “heat block with electronics” ( English warm electronics box , “WEB”), which is responsible for the movement of Opportunity, as well as for the deployment of the manipulator. An on-board computer is about the same power as a good laptop (for 2003). The memory is about 1000 times more than its predecessor, the rover Sojorner . [eleven]
Opportunity's on-board computer is built on a 32-bit radiation-resistant processor " RAD6000 ", operating at a frequency of 20 MHz. It contains 128 megabytes of RAM, as well as 256 megabytes of flash memory. [eleven]
Important rover systems are installed in a module called the “Rover Electronics”, which is fixed in the “heat block with electronics”. This module is located exactly in the center of the rover. The gold coating on the walls of the blocks helps to keep the heat from the heaters, because the night temperatures on Mars can drop to −96 degrees Celsius. Thermal insulation is a layer of airgel . Airgel is a unique material with a record low density and a number of unique properties: hardness, transparency, heat resistance, extremely low heat conductivity, etc. In an air environment under normal conditions, the density of such a metal microlattice is 1.9 kg / m³ due to intragrating air , its density is only 1.5 times higher than air density, which is why the airgel is called "solid smoke". [eleven]
An inertial measuring device measures the incline of the rover and helps make precise movements. [eleven]
The host computer also conducts regular maintenance of the rover. Its software ensures the correct functioning of all systems. [eleven]
Energy Generation
As in the Mars Pathfinder mission , the energy needed to power the rover systems is generated by solar panels . Solar panels are located on the “wings” of the rovers and consist of separate cells, which significantly increases the reliability of the mission. Developed specifically for Spirit and Opportunity, to achieve the maximum area for collecting light, as far as possible. (see picture to the left) [12]
Another innovation for rovers is the addition of a triple layer of gallium arsenide . This is the first use of three-layer solar cells in the history of Mars exploration . The battery cells can absorb more sunlight than their obsolete version installed on the Sojorner rover , which worked in 1997. Solar cells are located in three layers of the solar panels of the rover, and therefore are able to absorb more sunlight, and as a result, they can generate more electricity to recharge the lithium-ion batteries of the rovers [12] .
In the Mars Pathfinder mission, the Sojorner rover used one 40 Ah lithium battery. In the Mars Exploration Rovers mission, rovers use two lithium-ion batteries, each with a capacity of 8 Ah. While Opportunity was on Mars, the maximum rate of energy production by solar panels was close to 900 W * hour for 1 Martian day, or sol. On average, the Spirit and Opportunity solar panels produced 410 W * h / sol [12] (due to the gradual accumulation of Martian dust on them).
Communication
- Communication with orbital vehicles
Mars rovers of the Mars Exploration Rovers mission use the Mars Odyssey orbiter, which constantly revolves around the "red planet," as a repeater.
For 16 minutes he is in the zone of “communication” with the rover, after which he is hiding behind the horizon. Opportunity can “communicate” with the orbiter for 10 minutes, during this period it receives data from the rover [13] .
The vast majority of scientific data is transmitted to the composition of the mission to Earth through the rover "UHF antenna", which is also used to communicate with the orbital apparatus Mars Odysseus. Mars Odyssey transmits the bulk of scientific data obtained from both rovers. Another orbiter, Mars Global Surveyor , transmitted about 8% of all data before it went down in November 2006, after 10 years of operation. A small amount of data was transmitted directly to the Earth through an “X-band” antenna. [13]
Orbital vehicles with powerful “ X-band ” antennas are capable of transmitting data to the Earth at a higher speed. The transmission speed is not high, therefore, to increase it, the Long-Range Space Communication Complex was built, the diameter of the main parabolic antenna of which is 70 meters. [13]
- Communication with the Transit Module
Two antennas were installed on the Transit Module, which are necessary for maintaining communication with the Earth. A low gain omnidirectional antenna was used when the ship was near the Earth. Due to the fact that it sends a signal in all directions, it does not need to aim at the Earth to switch to another communication channel. After that, a pointed antenna with an average gain factor comes into play, for successful operation it should be directed towards the Earth , the antenna had great power, since in flight the distance to the Earth gradually increased. [13]
Away from Dangers
Mars rovers of the Mars Exploration Rovers mission have a control system for dangerous zones, and therefore rovers can safely avoid them during movement. The implementation of this system is the first in the history of the study of Mars, developed at Carnegie Mellon University.
Two other similar programs were combined into one software to increase overall productivity. The first one monitors the engine’s operation, controls the rover’s wheels, a cleaning brush, and a rock drilling tool (RAT). The second monitors the operation of the rover's solar panels , redirects energy to two batteries , serves as a night computer, and also controls the rover's clock. [fourteen]
Improved Vision
A total of twenty cameras that help rovers in finding traces of the effects of water on Mars, provide the Earth with high-quality photographs of the planet. The cameras of the Mars Exploration Rovers mission take pictures in a very high resolution, which is the highest indicator in the history of research. [fourteen]
Advances in technology have helped make the cameras lighter and more compact, which made it possible to install nine cameras on each rover, one on a descent platform (DIMES). The rover cameras developed at the Jet Propulsion Laboratory are the most advanced cameras that have ever descended to another planet. [fourteen]
Improved data compression
The data compression system, also developed at the Jet Propulsion Laboratory, allows to reduce the amount of data for subsequent transmission to Earth. ICER is based on wavelet transforms with the ability to process images. For example, an image of 12 MB will eventually be compressed to 1 MB, and thus will take up much less space on the memory card. The program divides all the images into groups of 30 images each, this procedure significantly reduces the risk of losing images when they are sent to Earth, to long-distance space networks in Australia . [fourteen]
Creating terrain maps while moving
Another innovation for this mission is the ability to create maps of nearby areas. For the scientific group, this is very valuable, since the maps allow you to determine patency, tilt angle, as well as the solar phase. Stereo images allow the team to create 3-D images, which makes it possible to accurately determine the location of the observed object. Maps developed on the basis of this data allow the team to know how far the rover needs to travel to the desired object, they also help in pointing the manipulator. [fourteen]
Soft Technology
Engineers faced the difficult task of reducing the speed of the spacecraft from 20,000 km / h when entering the atmosphere to 20 km / h when it hits the surface of Mars . [fifteen]
- Superior parachute and airbags
To enter the atmosphere, descend and land in the Mars Exploration Rovers mission, many of the achievements of its predecessors were used: the Viking Mission and the Mars Pathfinder . In order to slow down the rate of descent, the mission uses the legacy Viking Mission parachute technology launched in the late 1970s, as well as the 1997 Mars Pathfinder mission . The spacecraft of the Mars Exploration Rovers mission are much heavier than the previous ones, the basic design of the parachute remained the same, but its area is 40% larger than that of its predecessors. [fifteen]
Airbags have also been improved, this technology is used to mitigate the landing of the device used in the mission Mars Pathfinder . Around the landing module, which contained the rover , there were twenty-four inflated cells. The airbags are made from a very durable synthetic material called Vectran. The same material is used to make spacesuits . Again, with the increasing weight of the spacecraft, it was necessary to create more durable airbags. Several drop tests have shown that the extra mass causes serious damage and tearing of the material. Engineers developed a double shell of airbags designed to prevent serious damage during high-speed landing, when airbags can come in contact with sharp stones and other geological features of the Red Planet. [fifteen]
- Using rocket engines to slow down the speed of descent
To slow the speed of the descent of the spacecraft, three jet engines (RADs) located on its sides were used. A radar installation ( radar ) installed in the lower part of the landing module determined the distance to the surface. When the lander was at an altitude of 1.5 km, the radar system activated the Descent Image Motion Estimation Subsystem (DIMES) camera. The camera took three photos of the surface (with a delay of 4 seconds), which automatically determined the horizontal speed of the descent vehicle. After some time, the new propulsion system of the Mars Exploration Rovers mission began the descent of the Spirit rover. As expected, strong winds blow in the Gusev crater , which rocked the Spirit lander from side to side, preventing its safe landing. The jet engine vector system (TIRS) prevented chaotic side-to-side movement, making the lander more stable during landing. During the descent of Opportunity, the weather was more favorable on the Meridian Plateau than in the Gusev Crater, so there was no need to use its TIRS system to stabilize the descent. [fifteen]
Improved Rover Mobility
Spirit and Opportunity were designed with the ability to overcome various obstacles, as well as the rocky terrain of Mars. The Sojorner rover suspension system has been modified for the Mars Exploration Rovers mission. [16]
New software helps to avoid obstacles when moving. When contact with the breed is inevitable, an advanced suspension system comes into play, with which it is much easier for the rover to make maneuvers. [16]
The suspension system is fixed at the rear of the rover. The wheels increased in size, and also improved their design. Each wheel has a diameter of 26 centimeters. Their inner and outer parts are connected by a special spiral structure, which allows you to absorb the force of the impact to prevent its spread. The suspension system allows you to better overcome obstacles, for example, stones, which can be larger than the wheels themselves. Each wheel has a tread with characteristic protrusions that provide improved grip when riding on stones and soft ground. The inside of the wheels consists of a material called Solimide, which retains its elasticity even at very low temperatures and is therefore ideal for the harsh conditions of Mars. [16]
Walking the paths of least resistance
Mars rovers of the Mars Exploration Rovers mission have better physical characteristics than the Sojourner rover of 1997, and therefore the Spirit and Opportunity need more autonomy. Инженеры улучшили авто-навигационное программное обеспечение вождения, с возможностью делать карты местности, что делает роверы более самостоятельными. [16]
Когда роверу дают команду на самостоятельное передвижение, он начинает анализировать близлежащую местность, после этого делает стереоизображения, с помощью которых выбирает наилучший безопасный маршрут. Марсоходам необходимо избегать любые препятствия на своем пути, поэтому роверы распознают их на своих стереоснимках. Эта инновация позволила передвигаться на более длинные расстояния, чем при ручной навигации с Земли. По состоянию на середину августа 2004 года марсоход «Оппортьюнити», используя автоматическую самонавигацию, проехал 230 метров (треть расстояния, находящегося между кратером Игл и кратером Выносливость ), марсоход Спирит — более 1250 метров, из запланированных 3000 метров езды к «Холмам Колумбии». [16]
Автоматическая система навигации делает снимки близлежащей местности, используя одну из двух стереокамер. После этого стереоизображения преобразуются в 3-D карты местности, которые автоматически создаются программным обеспечением ровера. Программное обеспечение определяет какова степень проходимости, безопасна ли местность, высоту препятствий, плотность грунта и угол наклона поверхности. Из десятков возможных путей ровер выбирает кратчайший, самый безопасный путь к своей цели. Затем, проехав от 0,5 до 2 метра (в зависимости от того, сколько препятствий находится на его пути), ровер останавливается, анализируя препятствия, находящиеся неподалеку. Весь процесс повторяется, пока он не достигнет своей цели или же пока ему не прикажут остановиться с Земли. [16]
Программное обеспечение вождения в миссии Mars Exploration Rovers более совершенно, чем у Соджорнера. Система безопасности Соджорнера могла захватывать только по 20 точек на каждом шагу; система безопасности «Спирита» и «Оппортьюнити» обычно захватывает более 16 000 точек . Средняя скорость роверов, с учётом уклонения от препятствий, составляет около 34 метров в час — в десять раз быстрее, чем у Соджорнера. За все три месяца своей работы Соджорнер проехал чуть более 100 метров. Спирит и «Оппортьюнити» превзошли эту отметку в один и тот же день; Спирит проехал 124 метра на 125 сол, а «Оппортьюнити» проехал 141 метр на 82 сол. [16]
Ещё одна инновация в миссии Mars Exploration Rovers — это добавление визуальной одометрии , находящейся под контролем программного обеспечения. Когда ровер едет по песчаному или каменистому участку, то его колёса могут проскальзывать и вследствие этого выдавать неправильные показания одометрии. Визуальная одометрия помогает исправить эти значения, показывая как далеко на самом деле проехал марсоход. Она работает путём сравнения снимков, сделанных до и после короткой остановки, автоматически находя десятки приметных объектов (например: камни, следы от колес и песчаных дюн), отслеживая расстояние между последовательно снятыми изображениями. Объединение их в 3-D снимки предоставляет намного больше информации — все это гораздо легче и точнее, чем подсчёт пройденного расстояния по количеству оборотов колеса. [16]
Gallery
АМС на сборке (Оппортьюнити)
Старт ракеты Дельта-2 с АМС с марсоходом (Спирит)
Спускаемый аппарат при входе в атмосферу Марса
Парашют и ракетные двигатели спускаемого аппарата перед посадкой
Воздушные подушки спускаемого аппарата
Посадка спускаемого аппарата с амортизацией
Посадочная платформа на Марсе (Спирит)
Следы марсохода на марсианской поверхности (Оппортьюнити)
Манипулятор марсохода (Спирит)
Главная панорамная камера марсохода MER
Первый вид поверхности Марса с марсохода (Спирит), район кратера Гусева
Панорама
Filmography
- Три эпизода документального сериала « Nova »
- « Камни Марса. Год спустя », 2005
- « Катание по Марсу », 2006
- « Пять лет на Марсе (Марсианские роботы) », 2008
- « Гибель марсохода » ( англ. Death of a Mars Rover ), 2011
See also
- Соджонер — первый марсоход (марсоход первого поколения), работал на Марсе в 1997 году .
- Спирит — марсоход программы Mars Exploration Rover.
- Оппортьюнити — марсоход программы Mars Exploration Rover.
- Феникс — автоматическая марсианская станция. Первая мягкая посадка в полярном районе. Посадка 25 мая 2008, последний сеанс связи 2 ноября 2008.
- Куриосити — марсоход третьего поколения. Работает на Марсе с 6 августа 2012
Notes
- ↑ Максим Борисов. Названия американским марсоходам дала девятилетняя сирота из Сибири . Грани.Ру (10.06.2003). Дата обращения 17 мая 2010. Архивировано 24 августа 2011 года.
- ↑ Научные цели марсохода (англ.) . НАСА. Дата обращения 5 июня 2011. Архивировано 24 августа 2011 года.
- ↑ Mars Exploration Rover Mission: The Mission
- ↑ Chang, Kenneth . Martian Robots, Taking Orders From a Manhattan Walk-Up , The New York Times (November 7, 2004). Дата обращения 9 апреля 2009.
- ↑ Squyres, Steve. Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet . — Hyperion Press, 2005. — P. 113–117. — ISBN 978-1-4013-0149-1 .
- ↑ Error in footnotes ? : Invalid
<ref>; for footnotesДокумент с сайта НАСАno text specified - ↑ MER - Batteries and Heaters Neopr . Jet Propulsion Laboratory . NASA Date of treatment August 13, 2012. Archived October 18, 2012.
- ↑ Opportunity rover found traces of fresh water
- ↑ Spirit rover found crystalline salt, possibly sea salt
- ↑ 1 2 Batteries and Heaters
- ↑ 1 2 3 4 5 Technologies of Broad Benefit: Avionics
- ↑ 1 2 3 Error in footnotes ? : Invalid
<ref>; no text forUSGSfootnotes - ↑ 1 2 3 4 Technologies of Broad Benefit: Telecommunications // marsrover.nasa.gov
- ↑ 1 2 3 4 5 Technologies of Broad Benefit: Software Engineering
- ↑ 1 2 3 4 In-situ Exploration and Sample Return: Entry, Descent, and Landing
- ↑ 1 2 3 4 5 6 7 8 In-situ Exploration and Sample Return: Autonomous Planetary Mobility
Links
- Mars Exploration Rover Space Program Section at Jet Propulsion Laboratory
- Mars Exploration Rover Space Program Section at NASA
- Mars Exploration Rover Space Program Page at Malin Space Science Systems
- Spirit and Opportunity News ] // Compulenta.ru
- Popular article "Search on the planet Aelita" // Around the World
- Walking with Mars rovers // infuture.ru
- IBM RAD6000 processor specification // worldlingo.com
- xkcd.com // Spirit - comic book xkcd .