
CyberKnife ( English CyberKnife ) - a radiosurgical system manufactured by Accuray, designed to treat benign and malignant tumors and other diseases [1] [2] . Developed in 1992 by Stanford University (USA) professor of neurosurgery and radiation oncology John Adler and Peter and Russell Schonberg of Schonberg Research Corporation . Manufactured by Accuray, headquartered in Sunnyvale , California .
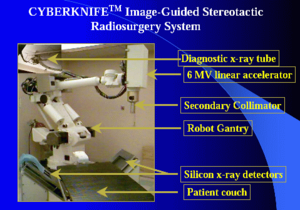
The method of system exposure is based on radiation therapy with the aim of more accurate exposure than conventional radiation therapy [3] Two main elements of the system: (1) a small linear accelerator that generates radiation, and (2) a robotic device that allows you to direct energy to any part of the body from any direction.
According to the manufacturer, at present, about 250 cyberknife installations have been installed in the world, more than 100,000 patients have received treatment. Most of these facilities are located in US clinics, followed by Japan. To a lesser extent - in the countries of Europe and Asia.
Content
Key Features
The radiation source is installed on an industrial multipurpose robot. The original CyberKnife installation used a Japanese robot manufactured by Fanuc, and more modern systems used a robot made by the German company KUKA KR 240. The robot has a portable linear accelerator with an emission band in the X-ray range that can irradiate an object with an index of 600 cGy per minute. The American Society of Radiation Oncology (ASTRO) announced the appearance of a model with a radiation index of 800 cGy per minute [4] . The radiation is collimated by means of tungsten collimators (also called cones) creating circular radiation fields. Currently, radiation fields with a width of 5 are used; 7.5; ten; 12.5; 15; 20; 25; thirty; 35; 40; 50 and 60 mm. ASTRO 2007 also saw the use of a variable aperture collimator IRIS [4] which uses two sets of six prismatic tungsten segments to form a blurred stable field in the form of a twelve-sided triangle, which eliminates the need for adjustment to fix the collimators. Mounting the radiation source on the robot allows you to get almost complete freedom in the position of the source in space near the patient and the instantaneous movement of the source, which allows you to irradiate from a variety of directions without the need to move both the patient and the source that occurs when using modern designs.
Image Management
CyberKnife uses an image management system. X-ray image cameras are located around the patient, so that instant x-ray images are obtained.
The original method (which is still in use) is the method of tracking the position of the skull. X-ray camera images are compared with a computer generated library of patient anatomical images. Digitally reconstructed radio images (DRRs) are transmitted to a computer algorithm that determines which changes in robot movement are necessary due to patient movements. The image system allows the cyberknife to radiate with an accuracy of 0.5 mm without the use of mechanical clamps attached to the patient’s head. [5] . Images are constructed using frameless stereotactic radiosurgery. This method is considered 6-dimensional (6-D), since corrections are made by rotational and translational movements in three directions (X, Y and Z). It should be noted that it is necessary to use some anatomical and artificial features for orienting the robot when x-ray radiation, because the tumor can not be sufficiently defined (if it is completely visible) in the images of the x-ray camera.
Additional methods of image control are available to work with tumors of the back and lungs. For back tumors, an option called Xsight-Spine is used [6] . Instead of collecting skull images, this method uses images of the spine. While the skull has a rigid, unchanging structure, the vertebrae can move relative to each other, so it is necessary to use image distortion algorithms to correct image distortions of the X-ray camera.
Recently, Xsight-Lung [7] was developed, an improvement of the Xsight method that allows tracking the position of some pulmonary tumors without implantation of comparative markers [8] .
For some soft tissue tumors, a comparative position tracking method may be used. [9] . Small metal markers are made of gold (for biocompatibility) of high density to obtain good contrast x-ray images and are implanted into the patient by surgery. The procedure is performed by an interventional radiologist or neurosurgeon. Marker placement is a critical step in conducting an examination. If they are too far from the location of the tumor or are not sufficiently scattered relative to each other, it will become impossible to accurately distribute the radiation. As soon as the markers are placed in place, they are displayed on the CT scanner, the image monitoring system is programmed in accordance with their position. After obtaining images by an X-ray camera, the position of the tumor relative to the markers is determined and the corresponding part of the human body is irradiated. Thus, the comparative tracking method does not require information about the anatomy of the skeleton for positioning the radiation. However, it is known that markers can migrate, which limits the accuracy of treatment if it could not be performed at the appropriate time between the time of implantation and treatment to stabilize the markers [10] [11] .
The CyberKnife system can also use the synchronization method. This method uses a combination of implantable fiduciary markers (usually small gold markers that are clearly visible on x-ray images) and light-emitting optical fibers (LED markers) mounted on the patient’s skin. Their position is also marked by a tracking infrared camera. Because the tumor is constantly moving, the x-ray cameras required to obtain a constant image require too much radiation to reach the patient’s skin. The synchronization system solves this problem by periodically acquiring an image of internal markers and calculating a model of the connection between the movement of external LED markers and internal markers. The method got its name, because synchronization of two data streams requires time stamps from two sensors (X-ray infrared LEDs).
To prevent hidden robot movements and image changes, motion prediction is used. Before starting treatment, a computer algorithm creates a correlation model that answers the question about the relationship between the movement of internal markers in comparison with the movement of external markers. During treatment, the system periodically notes the position of the internal markers and the corresponding position of the tumor based on the movement of the cutaneous markers. During treatment, the correlation model is updated with a constant time step. Thus, the synchronization tracking method does not make assumptions about the regularity or reproducibility of the patient’s breathing pattern.
For the synchronization system to work properly, it is necessary for any correlation model to have a functional relationship between markers and internal fiduciary markers. The placement of an external marker is also important; markers are usually located in the patient’s stomach, so their movement reflects the internal movement of the diaphragm and lungs. The synchronization method was invented in 1998 [12] [13] . The first patients were treated at the Cleveland Hospital in 2002. This method is mainly used for cancer of the lungs and pancreas [14] [15] .
RoboCouch
To change the position of patients during treatment, a robotic bed with six degrees of freedom, called RoboCouch, is used [16] .
Frameless Foundation
The frameless backbone of the CyberKnife system also enhances clinical efficacy. In a traditional frame-based radiosurgery, the accuracy of the intervention depends only on the connection of the rigid frame to the patient. The frame is attached to the patient's skull with invasive aluminum or titanium screws. The CyberKnife system is the only radiosurgical device that does not require a frame for accurate target determination [17] . Once the frame is installed, the relative positions of the human anatomy can be determined by CT or MRI scanners. After scanning, the doctor can plan the exposure using a dedicated computer program, and the frame is removed. Thus, using a frame requires a linear sequence of events before the next patient can be treated. Phased radiosurgery through the CyberKnife system is of particular benefit to patients who have previously received large doses of conventional radiotherapy and to patients with gliomas near critical areas of the brain. In contrast to radiotherapy of the whole brain, which can be carried out daily for several weeks, radiosurgery can usually be performed in 1-5 treatment sessions. Radiosurgery can be used alone for the treatment of brain tumors or in combination with surgery or radiotherapy of the whole brain, which depends on the specific clinical circumstances [18] .
In iterative optimization, simplex optimization, or Sequential Optimization, the solution set can consist of the sum of the number of isocentrically targeted beams and non-isocentrically targeted beams. Therefore, the maximum number of potential beams in a single treatment plan is 10,256 beams, if 32 isocenters are targeted and 12 collimators are used to generate a treatment plan using Sequential Optimization.
- CK's Physics Essential Guide
Another feature of this system is the presence of a number of tracking systems that track the location of the tumor in space, including in real time. This allows you to automatically adjust the beam guidance during the treatment session, which ensures high (submillimeter) accuracy not only of the positioning of the accelerator, but also of the irradiation itself without rigid fixation of the patient, that is, without a stereotactic frame that is attached to the patient’s skull, for example, in the treatment of “ Gamma by the foot . " Tracking is provided by two pairs of "X-ray tube - detector on amorphous silicon", the images from which are sent to a computer that processes them and creates a stereoscopic image. The reference points for this system are the patient’s bone structures, radiopaque marks and, in case of sufficient contrast, the tumor itself. With radiosurgical treatment of the lung area during respiration, a tumor is displaced in space. The complex of CyberKnife tracking systems allows for accurate treatment without restricting the patient’s breathing, modeling the position of the therapeutic target by the position of the IR sensors on the patient’s body (that is, by a respiratory excursion). The high accuracy of the positioning of the ionizing radiation beam makes it possible to use much larger radiation doses per session in the patient’s treatment, which reduces the course of treatment from several weeks to one to five days [19] [20] .
Clinical application
Since August 2001, the US Department of Health has authorized the use of the CyberKnife system to treat tumors in any part of the human body [21] . The system is used to treat tumors of the pancreas [15] [22] , liver [23] , prostate [24] [25] , spine [26] , throat and brain cancer [27] and benign tumors [28] .
None of the studies found any excess of the survival rate when using the system compared to other methods. With an increase in the accuracy of irradiation, the possibility of increasing the dose increases and a subsequent increase in efficiency is possible, especially in local ratios. Moreover, the scope of studies was limited, and more extensive studies are needed to determine changes in survival rates [22]
In 2008, actor Patrick Swayze was treated on a CyberKnife installation [29] .
CyberKnife in Russia
The first state CyberKnife was opened in Chelyabinsk in 2011 [30] [31] .
In 2012, the Cyberknife VSI radiosurgical complex was commissioned at the Interregional Medical Center for Early Diagnosis and Treatment of Oncological Diseases LLC in Voronezh. [32]
At the beginning of 2018, several CyberKnife installations were operating in Russia. For example, the CyberKnife G4 radiosurgical complex operating at the IIBS Cancer Clinic in St. Petersburg [33]
The cost of the apparatus in Russia according to the public procurement system in 2012 was about 295 million rubles [34] .
See also
- Stereotactic Radiosurgery
- Radiotherapy
- Gamma knife
- Stereotaxis
- Medical linear accelerator
Notes
- ↑ Radiosurgery / Cyberknife . Stanford School of Medicine
- ↑ Coste-Manière, E. et al. (March 1, 2005) "Robotic Whole Body Stereotactic Radiosurgery: Clinical Advantages of the CyberKnife® Integrated System . " Robotics Online .
- ↑ Plowman, Nick. How CyberKnife Works . London HCA
- ↑ 1 2 Accuray Announces Four New Products at Nation's Leading Radiation Oncology Meeting . accuray.com. October 29, 2007
- ↑ Inoue M. , Sato K. , Koike I. 2722 // International Journal of Radiation Oncology * Biology * Physics. - 2006. - November ( t. 66 , No. 3 ). - S. S611 . - ISSN 0360-3016 . - DOI : 10.1016 / j.ijrobp.2006.07.1138 .
- ↑ Xsight Spine Tracking System . Accuray
- ↑ Xsight Lung Tracking System . Accuray
- ↑ Schweikard A. , Shiomi H. , Adler J. Respiration tracking in radiosurgery without fiducials. (Eng.) // The international journal of medical robotics + computer assisted surgery: MRCAS. - 2005. - Vol. 1, no. 2 . - P. 19-27. - DOI : 10.1002 / rcs.38 . - PMID 17518375 .
- ↑ CyberKnife Radiosurgery - Fiducial Overview . sdcyberknife.com
- ↑ Fuller CD; Scarbrough TJ Fiducial Markers in Image-guided Radiotherapy of the Prostate // Russian Oncological Disease: journal. - 2006. - Vol. 1 , no. 2 . - P. 75-9 .
- ↑ Murphy Martin J. Fiducial-based targeting accuracy for external-beam radiotherapy // Medical Physics. - 2002. - February 20 ( t. 29 , No. 3 ). - S. 334—344 . - ISSN 0094-2405 . - DOI : 10.1118 / 1.1448823 .
- ↑ Schweikard A. , Glosser G. , Bodduluri M. , Murphy MJ , Adler JR Robotic motion compensation for respiratory movement during radiosurgery. (Eng.) // Computer aided surgery: official journal of the International Society for Computer Aided Surgery. - 2000. - Vol. 5, no. 4 . - P. 263-277. - DOI : 10.1002 / 1097-0150 (2000) 5: 4 <263 :: AID-IGS5> 3.0.CO; 2-2 . - PMID 11029159 .
- ↑ Schweikard A. , Shiomi H. , Adler J. Respiration tracking in radiosurgery. (English) // Medical physics. - 2004. - Vol. 31, no. 10 . - P. 2738-2741. - PMID 15543778 .
- ↑ Muacevic, Alexander et al. (December 9, 2009) "Single-Session Lung Radiosurgery Using Robotic Image-Guided Real-Time Respiratory Tumor Tracking." Cureus .
- ↑ 1 2 Koong AC , Le QT , Ho A. , Fong B. , Fisher G. , Cho C. , Ford J. , Poen J. , Gibbs IC , Mehta VK , Kee S. , Trueblood W. , Yang G. , Bastidas JA Phase I study of stereotactic radiosurgery in patients with locally advanced pancreatic cancer. (English) // International journal of radiation oncology, biology, physics. - 2004. - Vol. 58, no. 4 . - P. 1017-1021. - DOI : 10.1016 / j.ijrobp.2003.11.004 . - PMID 15001240 .
- ↑ RoboCouch Patient Positioning System . Accuray
- ↑ "Rocky Mountain CyberKnife Center - Brain Metastases" Archived April 12, 2009 on the Wayback Machine . rockymountainck.com .
- ↑ Chang SD , Main W. , Martin DP , Gibbs IC , Heilbrun MP An analysis of the accuracy of the CyberKnife: a robotic frameless stereotactic radiosurgical system. (English) // Neurosurgery. - 2003. - Vol. 52, no. 1 . - P. 140-146. - PMID 12493111 .
- ↑ Andrey Grishkovets. The work of the scalpel da Vinci . Forbes forbes.ru (July 28, 2010). Date of treatment March 26, 2013. Archived on April 5, 2013.
- ↑ Schweikard, A., Glosser, G., Bodduluri, M., Murphy, MJ, & Adler, JR (2000). Robotic motion compensation for respiratory movement during radiosurgery. Computer Aided Surgery, 5 (4), 263-277
- ↑ “Reimbursement Information” Archived October 27, 2010 on the Wayback Machine . CyberKnife. Web March 10, 2010.
- ↑ 1 2 Koong AC , Christofferson E. , Le QT , Goodman KA , Ho A. , Kuo T. , Ford JM , Fisher GA , Greco R. , Norton J. , Yang GP Phase II study to assess the efficacy of conventionally fractionated radiotherapy followed by a stereotactic radiosurgery boost in patients with locally advanced pancreatic cancer. (English) // International journal of radiation oncology, biology, physics. - 2005. - Vol. 63, no. 2 . - P. 320—323. - DOI : 10.1016 / j.ijrobp.2005.07.07.002 . - PMID 16168826 .
- ↑ Lieskovsky YC , Koong A. , Fisher G. , Yang G. , Ho A. , Nguyen M. , Gibbs I. , Goodman K. Phase I Dose Escalation Study of CyberKnife Stereotactic Radiosurgery for Liver Malignancies // International Journal of Radiation Oncology * Biology * Physics. - 2005. - October ( t. 63 ). - S. S283 . - ISSN 0360-3016 . - DOI : 10.1016 / j.ijrobp.2005.07.483 .
- ↑ Hara W. , Patel D. , Pawlicki T. , Cotrutz C. , Presti J. , King C. 2206 // International Journal of Radiation Oncology * Biology * Physics. - 2006. - November ( t. 66 , No. 3 ). - S. S324 — S325 . - ISSN 0360-3016 . - DOI : 10.1016 / j.ijrobp.2006.07.612 .
- ↑ “Is CyberKnife Ready for Prime Time in Prostate Cancer?” WSJ . November 28, 2008.
- ↑ Gerszten PC , Ozhasoglu C. , Burton SA , Vogel WJ , Atkins BA , Kalnicki S. , Welch WC CyberKnife frameless stereotactic radiosurgery for spinal lesions: clinical experience in 125 cases. (English) // Neurosurgery. - 2004. - Vol. 55, no. 1 . - P. 89-98. - PMID 15214977 .
- ↑ Liao JJ , Judson B. , Davidson B. , Amin A. , Gagnon G. , Harter K. CyberKnife Fractionated Stereotactic Radiosurgery for the Treatment of Primary and Recurrent Head and Neck Cancer // International Journal of Radiation Oncology * Biology * Physics. - 2005. - October ( t. 63 ). - S. S381 . - ISSN 0360-3016 . - DOI : 10.1016 / j.ijrobp.2005.07.650 .
- ↑ Bhatnagar AK , Gerszten PC , Ozhasaglu C. , Vogel WJ , Kalnicki S. , Welch WC , Burton SA CyberKnife Frameless Radiosurgery for the treatment of extracranial benign tumors. (English) // Technology in cancer research & treatment. - 2005. - Vol. 4, no. 5 . - P. 571-576. - PMID 16173828 .
- ↑ Thomas, Liz (21 July 2008) "Patrick Swayze smiling again after 'miracle' response to cancer treatment . " Mail Online
- ↑ About the clinic - GBUZ "Chelyabinsk Regional Clinical Oncology Dispensary" . www.chelonco.ru. Date of appeal October 12, 2018.
- ↑ Ten patients Have already gone under the Cyberknife in the Chelyabinsk Region . chelyabinsk.74.ru. Date of appeal October 12, 2018.
- ↑ Interregional Medical Center for Early Diagnosis and Treatment of Cancer . www.oncoclinic.su. Date of treatment April 19, 2019.
- ↑ Treatment on a cyber knife. MIBS, St. Petersburg. . radiosurgery.ldc.ru. Date of treatment March 9, 2018.
- ↑ Information on the contract No. 0373100068212000379
Links
- Новая альтернатива в лечении рака . Московский комсомолец . mk.ru (11 мая 2011). Дата обращения 27 марта 2013. Архивировано 5 апреля 2013 года.