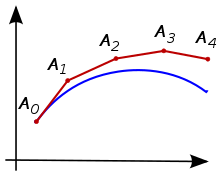
Euler's method is the simplest numerical method for solving systems of ordinary differential equations . First described by Leonard Euler in 1768 in the work “Integral Calculus” [1] . Euler's method is an explicit, one-step method of the first order of accuracy. It is based on approximation of the integral curve by a piecewise linear function, the so-called Euler broken line.
Content
Method Description
Let the Cauchy problem for the first order equation be given:
where is the function defined on some area {\ displaystyle D \ subset \ mathbb {R} ^ {2}} . The solution is sought on the interval . At this interval, we introduce the nodes:
Approximate solution in nodes which we denote by is determined by the formula:
These formulas are directly generalized to the case of systems of ordinary differential equations.
Estimation of the error of the method on the step and in the whole
The error at the step or local error is the difference between the numerical solution after one step of the calculation and accurate solution at the point . The numerical solution is given by the formula
The exact solution can be decomposed into a Taylor series :
Local error we obtain, subtracting from the second equality the first:
This is true if has a continuous second derivative [2] . Another sufficient condition for the validity of this estimate, from which the previous one follows and which can usually be easily verified, is continuous differentiability. by both arguments [3] .
The total error, global or cumulative error is the error at the last point of an arbitrary finite segment of integration of the equation. To calculate the solution at this point is required steps where length of the segment. Therefore, the global error of the method .
Thus, the Euler method is a first order method - it has an error at the step and error in general [3] .
The value of the Euler method
The Euler method was historically the first method for the numerical solution of the Cauchy problem. O. Cauchy used this method to prove the existence of a solution to the Cauchy problem. Due to low accuracy and computational instability, the Euler method is rarely used to find solutions for the Cauchy problem in practice. However, due to its simplicity, the Euler method finds its application in theoretical studies of differential equations, variational calculus problems , and a number of other mathematical problems.
Modifications and generalizations
Modified Euler method with recalculation
To improve the accuracy and stability of the calculation of the solution, you can use the following implicit Euler method.
Forecast:
.
Correction:
.
To improve accuracy, the corrective iteration can be repeated by substituting .
The modified Euler method with recalculation has a second order of accuracy, but for its implementation it is necessary to calculate at least twice . The Euler method with recalculation is a type of Runge-Kutta method (predictor-corrector).
Adams – Bashfort Two-Step Method
Another way to improve the accuracy of the method is to use not one, but several previously calculated function values:
This is a linear multi-step method .
Implementations in programming languages
C implementation for function {\ displaystyle f (x, y) = 6x ^ {2} + 5xy} .
#include <stdio.h>
double func ( double x , double y )
{
return 6 * x * x + 5 * x * y ; // function of the first derivative
}
int main ( int argc , char ** argv )
{
int i , n ;
double x , y , h ;
h = 0.01 ; // step
n = 10 ; // number of iterations
x = 1 ; // x0
y = 1 ; // y0
for ( i = 0 ; i < n ; i ++ )
{
y + = h * func ( x , y ); // calculate yi
x + = h ;
}
return EXIT_SUCCESS ;
}
Implementation in Python 3.7 :
# n is the number of iterations, h is the step, (x, y) is the starting point
def Euler ( n = 10 , h = 0.01 , x = 1 , y = 1 ):
for i in range ( n ):
y + = h * function ( x , y )
x + = h
return x , y # solution
def function ( x , y ):
return 6 * x ** 2 + 5 * x * y # function of the first derivative
print ( Euler ())
See also
- Runge - Kutta Method
Literature
- Euler L. Integral calculus. Volume 1. - M .: Hittl. 1956. [1]
- Babenko K.I. Fundamentals of numerical analysis. - M .: Science. 1986
Notes
- ↑ Euler L. Integral Calculus, Volume 1, Section 2, Ch. 7
- ↑ Atkinson, Kendall A. (1989), An Introduction to Numerical Analysis (2nd ed.), New York: John Wiley & Sons , p. 342, ISBN 978-0-471-50023-0
- ↑ 1 2 Mathematical Encyclopedic Dictionary. - M .: “Owls. Encyclopedia " , 1988. - p. 641.