Cylindrical surfaces
Surface {\ displaystyle S}  called a cylindrical surface with a generatrix {\ displaystyle {\ vec {l}}}
called a cylindrical surface with a generatrix {\ displaystyle {\ vec {l}}}  if for any point {\ displaystyle M_ {0}}
if for any point {\ displaystyle M_ {0}}  of this surface, a straight line passing through this point parallel to {\ displaystyle {\ vec {l}}} belongs entirely to the surface {\ displaystyle S} .
of this surface, a straight line passing through this point parallel to {\ displaystyle {\ vec {l}}} belongs entirely to the surface {\ displaystyle S} .
Theorem (on the equation of a cylindrical surface).
If in some Cartesian rectangular coordinate system the surface {\ displaystyle S} has an equation {\ displaystyle f (x, y) = 0}  then {\ displaystyle S} - a cylindrical surface with a generatrix parallel to the axis {\ displaystyle OZ}
then {\ displaystyle S} - a cylindrical surface with a generatrix parallel to the axis {\ displaystyle OZ}  .
.
Equation curve {\ displaystyle f (x, y) = 0} in the plane {\ displaystyle z = 0}  , called the guide cylindrical surface.
, called the guide cylindrical surface.
If the guide of a cylindrical surface is given by a second-order curve , then such a surface is called a second-order cylindrical surface .
| Elliptical cylinder: | Parabolic cylinder: | Hyperbolic cylinder: |
|---|
{\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = 1}  | {\ displaystyle y ^ {2} = 2px}  | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}}!! = 1}  |
 |  |  |
| A pair of matching lines: | A pair of matching planes: | A pair of intersecting planes: |
|---|
| {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = 0} | {\ displaystyle y ^ {2} = 0} | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}}!! = 0} |
Conical surfaces
Surface {\ displaystyle S} called a conical surface with a vertex at a point {\ displaystyle O} if for any point {\ displaystyle M_ {0}} this surface is a straight line passing through {\ displaystyle M_ {0}} and {\ displaystyle O} belongs entirely to this surface.
Function {\ displaystyle F (x, y, z)} called homogeneous order {\ displaystyle m} , if a {\ displaystyle \ forall t \ in \ mathbb {R} \; \ forall x, y, z} the following is true: {\ displaystyle F (tx, ty, tz) = t ^ {m} F (x, y, z)}
Theorem (on the equation of a conical surface).
If in some Cartesian rectangular coordinate system the surface {\ displaystyle S} given by the equation {\ displaystyle F (x, y, z) = 0} where {\ displaystyle F (x, y, z)} Is a homogeneous function then {\ displaystyle S} - conical surface with a vertex at the origin.
If the surface {\ displaystyle S} set by function {\ displaystyle F (x, y, z)} which is a homogeneous algebraic polynomial of the second order, then {\ displaystyle S} called a second-order conical surface .
- The canonical equation of the second-order cone has the form:
- {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - {\ frac {z ^ {2} } {c ^ {2}}} = 0}
Rotation Surfaces
Surface {\ displaystyle S} called the surface of rotation around the axis {\ displaystyle OZ} if for any point {\ displaystyle M_ {0} (x_ {0}, y_ {0}, z_ {0})} of this surface, a circle passing through this point in the plane {\ displaystyle z = z_ {0}} centered in {\ displaystyle (0,0, z_ {0})} and radius {\ displaystyle r = {\ sqrt {x_ {0} ^ {2} + y_ {0} ^ {2}}}} belongs entirely to this surface.
Theorem (on the equation of the surface of revolution).
If in some Cartesian rectangular coordinate system the surface {\ displaystyle S} given by the equation {\ displaystyle F (x ^ {2} + y ^ {2}, z) = 0} then {\ displaystyle S} - surface rotation around the axis {\ displaystyle OZ} .
| Ellipsoid : | Single-cavity hyperboloid : | Double Cavity Hyperboloid: | Elliptical Paraboloid : | Hyperbolic paraboloid: |
|---|
| {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} + {\ frac {z ^ {2} } {c ^ {2}}} = 1} | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - {\ frac {z ^ {2} } {c ^ {2}}} = 1} | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - {\ frac {z ^ {2} } {c ^ {2}}} = - 1} | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = 2z} | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}} = 2z} |
| | | | | |
If {\ displaystyle a = b \ neq 0} The surfaces listed above are surfaces of revolution.
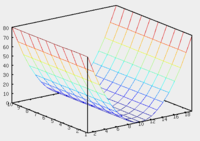
Elliptical Paraboloid
The elliptic paraboloid equation has the form
- {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = 2z.}
If a {\ displaystyle a = b} , then the elliptical paraboloid is a surface of revolution formed by the rotation of the parabola, the parameter of which {\ displaystyle p = a ^ {2} = b ^ {2}} , around a vertical axis passing through the vertex and focus of a given parabola.
Intersection of an elliptical paraboloid with a plane {\ displaystyle z = z_ {0}> 0} is an ellipse .
Intersection of an elliptical paraboloid with a plane {\ displaystyle x = x_ {0}} or {\ displaystyle y = y_ {0}} is a parabola .
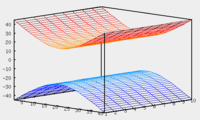
Hyperbolic Paraboloid
The hyperbolic paraboloid equation has the form
- {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}} = 2z.}
Intersection of a hyperbolic paraboloid with a plane {\ displaystyle z = z_ {0}} is a hyperbole .
Intersection of a hyperbolic paraboloid with a plane {\ displaystyle x = x_ {0}} or {\ displaystyle y = y_ {0}} is a parabola .
Due to the geometric similarity, a hyperbolic paraboloid is often called a saddle .
Center surfaces
If the center of a second-order surface exists and is unique, then its coordinates {\ displaystyle \ left (x_ {0}, \; y_ {0} \; z_ {0} \ right)} can be found by solving the system of equations:
{\ displaystyle {\ begin {cases} a_ {11} x_ {0} + a_ {12} y_ {0} + a_ {13} z_ {0} + a_ {14} = 0 \\ a_ {21} x_ { 0} + a_ {22} y_ {0} + a_ {23} z_ {0} + a_ {24} = 0 \\ a_ {31} x_ {0} + a_ {32} y_ {0} + a_ {33 } z_ {0} + a_ {34} = 0 \ end {cases}}}
The second-order surface equation can be rewritten in matrix form:
- {\ displaystyle {\ begin {pmatrix} x & y & z & 1 \ end {pmatrix}} {\ begin {pmatrix} a_ {11} & a_ {12} & a_ {13} & a_ {14} \\ a_ {21} & a_ {22} & a_ { 23} & a_ {24} \\ a_ {31} & a_ {32} & a_ {33} & a_ {34} \\ a_ {41} & a_ {42} & a_ {43} & a_ {44} \ end {pmatrix}} {\ begin {pmatrix} x \\ y \\ z \\ 1 \ end {pmatrix}} = 0}
You can also select the quadratic and linear parts from each other:
- {\ displaystyle {\ begin {pmatrix} x & y & z \ end {pmatrix}} {\ begin {pmatrix} a_ {11} & a_ {12} & a_ {13} \\ a_ {21} & a_ {22} & a_ {23} \\ a_ {31} & a_ {32} & a_ {33} \\\ end {pmatrix}} {\ begin {pmatrix} x \\ y \\ z \ end {pmatrix}} + 2 {\ begin {pmatrix} a_ {14 } & a_ {24} & a_ {34} \ end {pmatrix}} {\ begin {pmatrix} x \\ y \\ z \ end {pmatrix}} + a_ {44} = 0}
If designated {\ displaystyle A = {\ begin {pmatrix} a_ {11} & a_ {12} & a_ {13} \\ a_ {21} & a_ {22} & a_ {23} \\ a_ {31} & a_ {32} & a_ {33 } \\\ end {pmatrix}} \ quad b = {\ begin {pmatrix} a_ {14} & a_ {24} & a_ {34} \ end {pmatrix}} \ quad X = {\ begin {pmatrix} x & y & z \ end {pmatrix}} ^ {T}} , then the equation takes the following form:
- {\ displaystyle X ^ {T} AX + 2bX + a_ {44} = 0}
The values of the following quantities are stored during orthogonal transformations of the basis :
- Matrix related {\ displaystyle A} :
- {\ displaystyle I_ {1} = \ mathrm {tr} \, A}
- {\ displaystyle I_ {2} = {M_ {A}} _ {1,2} ^ {1,2} + {M_ {A}} _ {1,3} ^ {1,3} + {M_ {A }} _ {2,3} ^ {2,3}} where {\ displaystyle {M_ {A}} _ {i, j} ^ {i, j}} Is the second-order minor of matrix A located in rows and columns with indices i and j.
- {\ displaystyle I_ {3} = \ det A}
- Associated with the block (expanded) matrix {\ displaystyle B = {\ begin {pmatrix} A & b \\ b ^ {T} & a_ {44} \ end {pmatrix}}} [one]
- {\ displaystyle K_ {2} = \ sum _ {i = 1} ^ {3} \ sum _ {j = i + 1} ^ {4} {M_ {B}} _ {i, j} ^ {i, j}}
- {\ displaystyle K_ {3} = \ sum _ {i = 1} ^ {2} \ sum _ {j = i + 1} ^ {3} \ sum _ {k = j + 1} ^ {4} {M_ {B}} _ {i, j, k} ^ {i, j, k}}
- {\ displaystyle K_ {4} = \ det B}
Such invariants are also sometimes called semi-invariants or seven-invariants.
With the parallel transfer of the coordinate system {\ displaystyle I_ {1}, I_ {2}, I_ {3}, K_ {4}} remain unchanged. Wherein:
- {\ displaystyle K_ {3}} remains unchanged only if {\ displaystyle I_ {2} = I_ {3} = K_ {4} = 0}
- {\ displaystyle K_ {2}} remains unchanged only if {\ displaystyle I_ {2} = I_ {3} = K_ {4} = K_ {3} = 0}
Classification of second-order surfaces with respect to the values of invariants
| Surface | The equation | Invariants |
|---|
| Ellipsoid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} + {\ frac {z ^ {2} } {c ^ {2}}} = 1} | {\ displaystyle I_ {3} \ neq 0} | {\ displaystyle I_ {2}> 0, \ quad I_ {1} I_ {3}> 0} | {\ displaystyle I_ {4} <0} | | |
| Imaginary ellipsoid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} + {\ frac {z ^ {2} } {c ^ {2}}} = - 1} | {\ displaystyle I_ {4}> 0} | | |
| Point | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} + z ^ {2} = 0} | {\ displaystyle I_ {4} = 0} | | |
| Single Cavity Hyperboloid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - {\ frac {z ^ {2} } {c ^ {2}}} = 1} | {\ displaystyle I_ {2} = 0} or {\ displaystyle I_ {1} I_ {3} \ leq 0} | {\ displaystyle I_ {4}> 0} | | |
| Double Cavity Hyperboloid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - {\ frac {z ^ {2} } {c ^ {2}}} = - 1} | {\ displaystyle I_ {4} <0} | | |
| Cone | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - 2z ^ {2} = 0} | {\ displaystyle I_ {4} = 0} | | |
| Elliptical paraboloid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} - 2z = 0} | {\ displaystyle I_ {3} = 0} | {\ displaystyle I_ {4} \ neq 0} | {\ displaystyle I_ {4} <0} | | |
| Hyperbolic paraboloid | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}} - 2z = 0} | {\ displaystyle I_ {4}> 0} | | |
| Elliptical cylinder | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = 1} | {\ displaystyle I_ {4} = 0} | {\ displaystyle I_ {2}> 0} | {\ displaystyle I_ {1} K_ {2} <0} | |
| Imaginary elliptical cylinder | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + {\ frac {y ^ {2}} {b ^ {2}}} = - 1} | {\ displaystyle I_ {1} K_ {2}> 0} | |
| Straight (pair of imaginary intersecting planes) | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} + y ^ {2} = 0} | {\ displaystyle K_ {2} = 0} | |
| Hyperbolic cylinder | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - {\ frac {y ^ {2}} {b ^ {2}}} = 1} | {\ displaystyle I_ {2} <0} | {\ displaystyle K_ {2} \ neq 0} | |
| Pair of intersecting planes | {\ displaystyle {\ frac {x ^ {2}} {a ^ {2}}} - y ^ {2} = 0} | {\ displaystyle K_ {2} = 0} | |
| Parabolic cylinder | {\ displaystyle y ^ {2} = 2px} | {\ displaystyle I_ {2} = 0} | {\ displaystyle K_ {2} \ neq 0} | |
| Pair of parallel planes | {\ displaystyle x ^ {2} -d ^ {2} = 0} | {\ displaystyle K_ {2} = 0} | {\ displaystyle K_ {1} <0} |
| A pair of imaginary parallel planes | {\ displaystyle x ^ {2} + d ^ {2} = 0} | {\ displaystyle K_ {1}> 0} |
| Plane | {\ displaystyle x ^ {2} = 0} | {\ displaystyle K_ {1} = 0} |


 ,
, 






