

Hyperbola ( dr. Greek ὑπερβολή , from ὑπερ - “top” + βαλειν - “throw”) - the geometric place of points M of the Euclidean plane , for which the absolute value of the difference in distances from M to two selected points and (called magic tricks ) constantly. More precisely,


- moreover


Along with an ellipse and a parabola , a hyperbola is a conic section and a quadric . A hyperbola can be defined as a conical section with an eccentricity greater than unity.
History
The term “hyperbole” ( Greek ὑπερβολή - excess) was introduced by Apollonius of Perga (c. 262 BC - c. 190 BC ), since the problem of constructing a hyperbola point reduces to the problem of applying with excess .
Definitions
Hyperbole can be defined in several ways.
Conical section
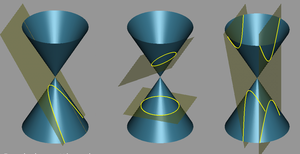
A hyperbola can be defined as a set of points formed as a result of the section of a circular cone by a plane cutting off both parts of the cone. Other results of a section of a cone by a plane are a parabola , an ellipse , as well as degenerate cases such as intersecting and coincident lines and a point that occur when the secant plane passes through the vertex of the cone. In particular, intersecting straight lines can be considered a degenerate hyperbola, coinciding with its asymptotes.
How a geometric place of dots
Through Magic
A hyperbola can be defined as the geometrical location of points , the absolute value of the difference in the distances from which to two given points, called foci, is constant.
For comparison: the curve of a constant sum of distances from any point to foci is an ellipse , a constant ratio is the circle of Apollonius , a constant product is the Cassini oval .
Via Directrix and Focus
The geometric location of the points for which the ratio of the distance to the focus and to a given line, called the directrix , is constant and greater than unity, is called a hyperbola. Preset constant called the eccentricity of the hyperbola.
Related Definitions
a is the distance from the center C to each of the vertices
b - the length of the perpendicular to the abscissa axis, restored from each of the vertices to the intersection with the asymptote
c is the distance from the center of C to any of the foci, F 1 and F 2 ,
θ is the angle formed by each of the asymptotes and the axis drawn between the vertices
- A hyperbola consists of two separate curves called branches .
- The points nearest to each other of two branches of a hyperbola are called vertices .
- The shortest distance between two branches of a hyperbola is called the major axis of the hyperbola.
- The middle of the major axis is called the center of the hyperbola.
- The distance from the center of the hyperbola to one of the peaks is called the semi-major axis of the hyperbola.
- Usually denoted by a .
- The distance from the center of the hyperbola to one of the tricks is called the focal distance .
- Commonly denoted by c .
- Both focuses of the hyperbola lie on the continuation of the major axis at the same distance from the center of the hyperbola. A straight line containing the major axis of the hyperbola is called the real , or transverse , axis of the hyperbola.
- The straight line, perpendicular to the real axis and passing through its center, is called the imaginary , or conjugate , axis of the hyperbola.
- The segment between the focus of the hyperbola and the hyperbola, perpendicular to its real axis, is called the focal parameter .
- The distance from the focus to the asymptote of the hyperbola is called the impact parameter .
- Usually denoted by b .
- In problems associated with the motion of bodies along hyperbolic trajectories, the distance from the focus to the nearest vertex of the hyperbola is called the pericentric distance
- Usually indicated .
Relationships
For the characteristics of the hyperbola defined above, the following relations exist
- .
- .
- .
- .
- .
- .
- .
- .
Equivalent Hyperbole
Hyperbola, in which are called equal - sided , or equilateral . An equilateral hyperbole in some rectangular coordinate system is described by the equation
the foci of the hyperbola are located at points ( a, a ) and ( −a, −a ). An equilateral hyperbole is a graph of inverse proportionality given by the formula:
The eccentricity of such a hyperbola is .
Equations
Cartesian coordinates
The hyperbola is given by an equation of the second degree in the Cartesian coordinates ( x , y ) on the plane:
- ,
where the coefficients A xx , A xy , A yy , B x , B y , and C satisfy the following relation
and
Canonical View
By moving the center of the hyperbola to the origin and rotating it relative to the center, the hyperbole equation can be reduced to the canonical form
- ,
where a is the actual semi-axis of the hyperbola; b - imaginary axis of the hyperbola [1] . In this case, the eccentricity is
Polar coordinates
If the pole is in the focus of the hyperbola, and the vertex of the hyperbola lies on the continuation of the polar axis, then
If the pole is in the focus of the hyperbola, and the polar axis is parallel to one of the asymptotes, then
Parametric Equations
Just as an ellipse can be represented by equations in parametric form, which include trigonometric functions, a hyperbola in a rectangular coordinate system whose center coincides with its center, and the abscissa axis passes through the foci, can be represented by equations in parametric form, which include hyperbolic functions [2] .
In the first equation, the “+” sign corresponds to the right branch of the hyperbola, and “-” corresponds to its left branch.
Properties
- Optical property. Light from a source located in one of the foci of the hyperbola is reflected by the second branch of the hyperbola so that the extensions of the reflected rays intersect in the second focus.
- In other words, if and hyperbole foci, then tangent at any point hyperbole is the angle bisector .
- For any point lying on a hyperbole, the ratio of the distances from this point to the focus to the distance from the same point to the directrix is a constant.
- A hyperbola has mirror symmetry with respect to the real and imaginary axes, as well as rotational symmetry when rotated through an angle of 180 ° around the center of the hyperbola.
- Each hyperbola has a conjugate hyperbola , for which the real and imaginary axes change places, but the asymptotes remain the same. This corresponds to replacing a and b with each other in the formula describing the hyperbola. The conjugate hyperbola is not the result of a rotation of the initial hyperbola by an angle of 90 °; hyperbolas vary in shape when .
- A segment of a tangent at each point of a hyperbola enclosed between two asymptotes of a hyperbola is divided by a point of tangency in half and cuts off a triangle of constant area from two asymptotes.
Asymptotes
For a hyperbola given in canonical form
the equations of two asymptotes have the form:
- .
Diameters and Chords
The diameter of a hyperbola, like any conical section, is a straight line passing through the midpoints of parallel chords. Each direction of parallel chords has its own conjugate diameter. All diameters of a hyperbola pass through its center. The diameter corresponding to the chords parallel to the imaginary axis is the real axis; the diameter corresponding to the chords parallel to the real axis is the imaginary axis.
Angular coefficient parallel chords and slope corresponding diameter is related by
If diameter a bisects chords parallel to diameter b , then diameter b bisects chords parallel to diameter a . Such diameters are called mutually conjugate . The main diameters are called mutually conjugate and mutually perpendicular diameters. A hyperbola has only one pair of main diameters - the real and imaginary axis.
Tangent and Normal
Since the hyperbola is a smooth curve, at each of its points ( x 0 , y 0 ) one can draw a tangent and a normal . The equation of the tangent to the hyperbola given by the canonical equation has the form:
- ,
or, which is the same
- .
| Derivation of the tangent equation |
|---|
The equation of the tangent of an arbitrary flat line has the form The canonical hyperbola equation can be represented as a pair of functions
Then the derivative of these functions has the form
Substituting this equation into the general equation of the tangent, we obtain |
The normal equation for a hyperbole has the form:
- .
| Derivation of the normal equation |
|---|
The normal equation of an arbitrary flat line has the form
The canonical hyperbola equation can be represented as a pair of functions
Then the derivative of these functions has the form
Substituting this equation into the general normal equation, we obtain
|
Curvature and Evolution
The curvature of a hyperbola at each of its points ( x , y ) is determined from the expression:
- .
Accordingly, the radius of curvature has the form:
- .
In particular, at the point ( a , 0 ), the radius of curvature is
- .
| Derivation of the formula for the radius of curvature |
|---|
The formula for the radius of curvature of a flat line, specified parametrically, has the form:
We use the parametric representation of the hyperbola: Then, the first derivative of x and y with respect to t has the form
and the second derivative is Substituting these values in the formula for curvature, we obtain:
|
The coordinates of the centers of curvature are given by a pair of equations:
Substituting in the last system of equations instead of x and y their values from the parametric representation of the hyperbola, we obtain a pair of equations defining a new curve consisting of the centers of curvature of the hyperbola. This curve is called the hyperbola evolute .
Summary
Hyperbole is a sinusoidal spiral at ;
Application
- The family of confocal ( confocal ) hyperbolas together with the family of confocal ellipses form a two-dimensional elliptical coordinate system .
- Other orthogonal two-dimensional coordinate systems constructed using hyperbolas can be obtained using other conformal transformations. For example, the transformation w = z ² maps the Cartesian coordinates into two families of orthogonal hyperbolas.
- By inverting a hyperbola with a center lying in its own center, in focus or at the apex, one can obtain a lemniscate Bernoulli , a snail of Pascal, or a stanoid , respectively.
- Hyperbolas can be seen on many sundials . Throughout any day of the year, the Sun describes a circle on the celestial sphere , and its rays incident on the top of the gnomon of a sundial describe a cone of light. The line of intersection of this cone with the plane of a horizontal or vertical sundial is a conical section . At the most populated latitudes and in most of the year, this conical section is a hyperbole. The sundial often shows the lines described by the shadow from the top of the gnomon during the day for several days of the year (for example, days of the summer and winter solstices), so you can often see certain hyperbols on them, the form of which is different for different days of the year and different latitudes .
See also
- Hyperboloid
- Hyperbolas described near a triangle
- Caustic
- Conical sections :
- Second order curve
- Circle
- Parabola
- Ellipse
- Curve of a constant sum of the distances between two points - Ellipse ,
- Curve of a constant difference of distances between two points - a hyperbole ,
- permanent relationship - the circle of Apollonius ,
- permanent work - oval Cassini .
- Smooth Octagon #Construction
Notes
- ↑ Schneider V.E. Short course in higher mathematics . - Ripol Classic. - ISBN 9785458255349 .
- ↑ Погорелов А. В. Геометрия. — М. : Наука , 1983. — С. 15—16. — 288 с.
Literature
- Бронштейн И. Гипербола // Квант . — 1975. — № 3 .
- Граве Д. А. Гиперболы // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и 4 доп.). - SPb. , 1890-1907.
- Математическая энциклопедия (в 5-и томах). М.: Советская энциклопедия , 1982.
- Маркушевич А. И. Замечательные кривые // Популярные лекции по математике . — Гостехиздат, 1952. — Вып. 4 . Архивировано 14 сентября 2008 года.